Universidad Nacional en Medellín desarrolla un robot para detectar emergencias
Fue presentando el desarrollo de robots para detectar y hacer seguimiento de incendios, derrames de petróleo y explosiones en bosques, mares y plantas nucleares.

Investigadores de la Universidad Nacional anunciaron el desarrollo de robots para detectar y hacer seguimiento de incendios, derrames de petróleo y explosiones en bosques, mares y plantas nucleares
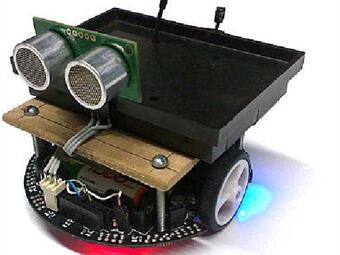
En el grupo de Redes de Sensores Robóticas (RSR), los investigadores vienen desarrollando unos autómatas que ayudarían a detectar anomalías en diferentes escenarios: incendios en los bosques, derrames de petróleos, incendios en plantas nucleares, crecimiento de algas peligrosas en lechos marinos, etcétera
Hasta el momento han desarrollado pruebas en ambientes controlados y esperan hacer pruebas que permitan sofisticar estos equipos autónomos para que se defiendan en estos terrenos agrestes
David Julián Saldaña Santacruz, estudiante de la maestría en Ingeniería de Sistemas de la Facultad de Minas, ganador de una convocatoria de la Dirección de Investigación, explicó que “la idea es ubicar unos robots que estén continuamente explorando el entorno y que detecten cualquier cambio en la variante física, para que luego coordinen, identifiquen y marquen el perímetro del problema”
“La iniciativa de las redes de sensores robóticas es que sean de bajo costo y que tengan ventajas sobre otros sistemas, como sensores o cámaras de video”, comentó
Los robots normalmente tienen dos capacidades: percibir el entorno con sus sensores de temperatura y de distancia para determinar dónde y cómo se encuentran; y ejecutar acciones con lo que se denomina actuadores, es decir, objetos como brazos o ruedas que permiten manipular objetos o efectuar desplazamientos. “Entonces, a partir de lo que censamos, llegamos a acciones que efectuarían los humanos”, explica Saldaña
Estos autómatas funcionan a partir de redes que se construyen basadas en el teorema de Bayes, que se ha empezado a usar en robótica
“Lo interesante de esta técnica es que el robot no tiene las cosas totalmente definidas. Cuando yo salgo no estoy seguro de que en una hora va a llover, pero si podría discernir que, debido a las condiciones climáticas, es posible que en una hora no llueva. Asimismo funcionan los robots. Si su sensor de temperatura está registrando mucho calor, él piensa que hay un incendio, pero no está seguro, entonces a su percepción le suma la de los otros autómatas y ya con todas la informaciones toman la decisión más acertada para actuar”, dice el investigador
En los ambientes escogidos se disponen diferentes robots para que empiecen a recorrer el terreno. Ellos se comunican por medio de señales de radio con una tecnología llamada ZigBee, que es un protocolo de alto nivel de comunicación inalámbrica que permite transmitir a una distancia de un kilómetro.